




工业机器人运动学标定与轨迹规划虚拟仿真实验指导书
一、实验设备与器材
1.计算机(Windows 及以上系统)
2.工业机器人运动学标定与轨迹规划虚拟仿真软件
3.实验指导书、实验报告模板
二、实验内容与步骤
(一)实验预习
1.预习D-H建模方法、正逆运动学、运动学标定、轨迹规划基本理论。
2.熟悉虚拟仿真平台界面、功能模块与操作逻辑。
(二)模块1:工业机器人D-H运动学建模
1.进入虚拟仿真平台,选择标准 6 自由度工业机器人模型。
2.依据连杆结构,依次定义各连杆D-H参数。
3.构建齐次变换矩阵,完成正运动学建模,验证末端位姿计算结果。
4.输入目标末端位姿,完成逆运动学求解,记录各关节角度。
(三)模块2:工业机器人运动学标定
1.建立名义模型:导入未补偿的初始D-H参数模型。
2.误差注入:在仿真系统中设置连杆长度、扭角、偏距、关节转角误差。
3.虚拟位姿测量:使用仿真激光跟踪仪/视觉系统,采集机器人末端实际位姿。
4.误差计算:对比理论位姿与实际位姿,计算位姿误差e。
5.参数辨识:采用最小二乘法/卡尔曼滤波求解 D-H 参数误差。
6.模型修正与补偿:更新D-H参数,得到精确运动学模型。
7.标定验证:对比标定前后定位误差,验证标定效果。
(四)模块3:机器人轨迹规划与仿真
1.选择标定后的精确模型,设置轨迹规划约束(速度、加速度、安全范围)。
2.点到点轨迹规划:设定起始点、目标点,完成关节空间轨迹规划与仿真。
3.直线轨迹规划:设定路径点,完成笛卡尔空间直线轨迹生成与仿真。
4.圆弧轨迹规划:设定起点、终点、中间点,完成圆弧轨迹规划与仿真。
5.观察轨迹平滑性、运动平稳性,记录轨迹偏差。
(五)模块4:实验结果分析与优化
1.分析标定误差、轨迹偏差产生原因。
2.优化 D-H 参数与轨迹规划参数,提升运动精度与平滑度。
3.导出实验数据,完成结果对比与总结。
三、实验数据记录
需记录以下关键数据:
1.D-H 建模原始参数与修正后参数
2.标定前/后末端定位误差值
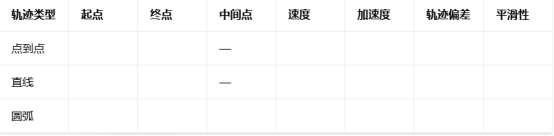
3.点到点、直线、圆弧轨迹规划参数
4.轨迹偏差、运动时间、平稳性评价
5.误差辨识与补偿关键参数
四、实验注意事项
1.实验前必须完成理论预习,严格按照虚拟平台操作规范执行步骤。
2.D-H 参数定义需准确,避免坐标系建立错误导致建模失败。
3.误差注入、参数辨识时合理设置数值,保证仿真结果有效。
4.轨迹规划需设置合理速度、加速度,防止机器人超限运动。
5.如实记录实验数据,不得篡改,保证实验真实性。
五、实验报告要求
1.写明实验名称、目的、原理、设备与步骤。
2.附上实验原始数据、仿真截图、误差对比曲线。
3.分析运动学建模、标定、轨迹规划中出现的问题及解决方法。
4.总结实验收获,阐述运动学标定与轨迹规划在工业机器人工程应用中的意义。
5.提出实验改进建议与拓展思考。
六、实验考核方式
1.预习情况(10%)
2.虚拟仿真操作规范性与完成度(40%)
3.实验数据记录与分析(30%)
4.实验报告质量(20%)